Blog 2: First Lidar Tests & Data Processing Plan
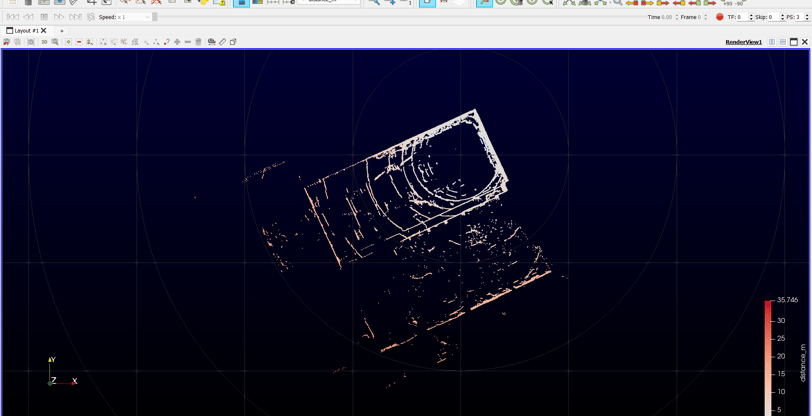
Now that I’ve refined my project focus, it’s time to start working with LiDAR data. I’ve downloaded VeloView, the official software for Velodyne Puck Lite, and done a few lab test scans. These were recorded in different formats, including .pcap and .json, to examine the raw data and determine what I can extract from it.
I’m also considering working on Linux as it might offer better integration with the Velodyne driver, but I’ll see how things go.
Processing Lidar Data – The Plan
The goal is to process these raw scans into useful structural information. The planned steps are:
Convert raw scans into point cloud data.
Process the point cloud: Extract valuable data and remove noise (e.g., using voxel grid filtering or similar methods).
Wall detection: Techniques such as RANSAC are used to identify flat surfaces.
Convert walls into 2D geometry.
Parse DXF floor plans using libraries like ezdxf.
Align coordinate systems (manually at first, then ideally automate this step).
Compare geometries using tools like Shapely to detect differences between the scan and the floor plan.
This is just the initial plan, and I expect the details to evolve as I test different methods. The next step is to experiment with point cloud processing and implement essential wall detection. I’ll update you on my progress in the next blog!


