Blog 5: Merging Multiple Frames into One Scan
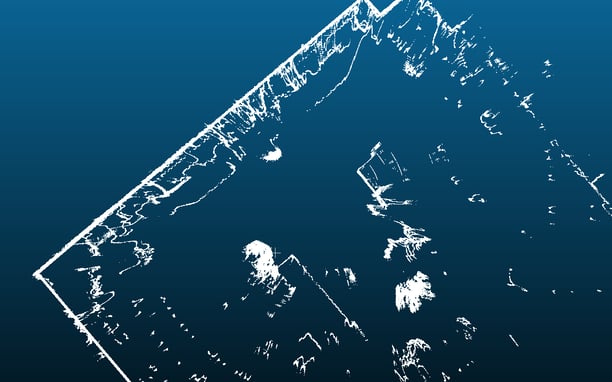
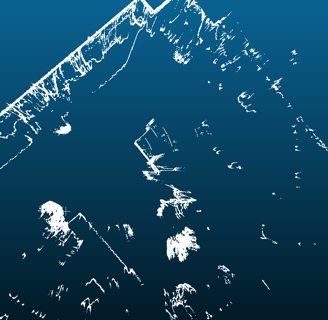
After working with CloudCompare to visualise my scans, I merged multiple frames to create a denser, more complete point cloud. Since my Lidar captures individual frames rather than a full scan at once, combining them helps improve data quality and structure detection.
Why Merge Frames?
Instead of working with just a single scan, combining multiple frames helps to:
Increase point cloud density by overlapping data.
Reduce noise through frame averaging.
Fill in the missing parts of the scan.
Rather than doing this manually in CloudCompare, I decided to automate the process using Python and Open3D.
How I Merged the Frames
The idea was to:
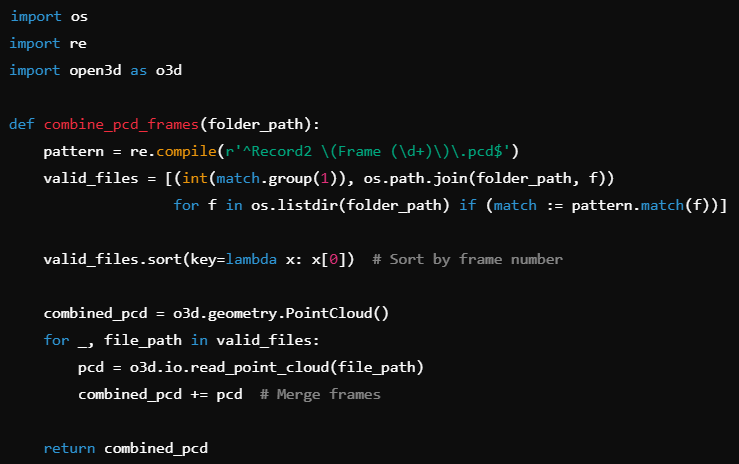
You can find all recorded frames in the folder (they follow the naming pattern "Record2 (Frame X).pcd").
Sort them in the correct order based on their frame number.
Load and merge them into a single point cloud.
Here’s a snippet of the key part of my script:
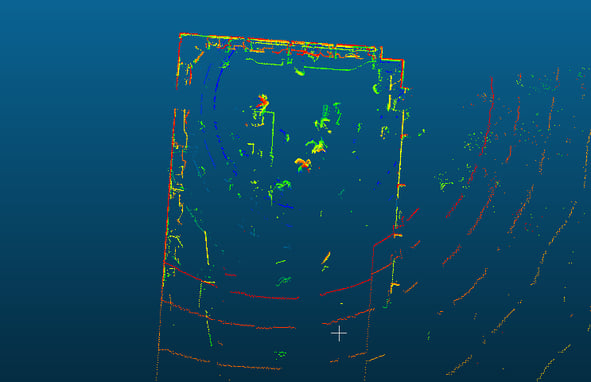
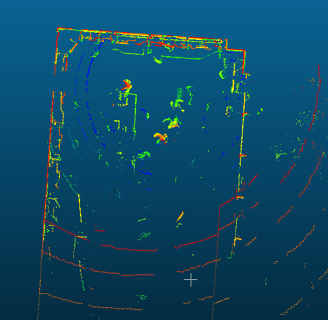
The merged scan has a much denser point cloud, making it more suitable for wall detection and structural analysis. In the next blog, I’ll focus on processing the point cloud by removing noise and preparing it for feature extraction.