Blog 9: Integrating LiDAR Scan Merging into the GUI
A key improvement in the LiDAR Floor Plan Extraction System is the new feature that enables users to merge point clouds directly within the graphical user interface (GUI). This makes it easier for people using multiple scan frames from the same position. Unlike older methods that required manual or scripted merging, the new interface allows users to combine .pcd files with a simple button click.
This feature is beneficial when a fixed LiDAR unit captures multiple frames from a single room. Instead of capturing the environment from different angles, the system increases scan density and reduces noise by combining duplicate data collected over a short period. This results in a more precise and more reliable point cloud, eliminating the need for complex adjustments across different scan positions.
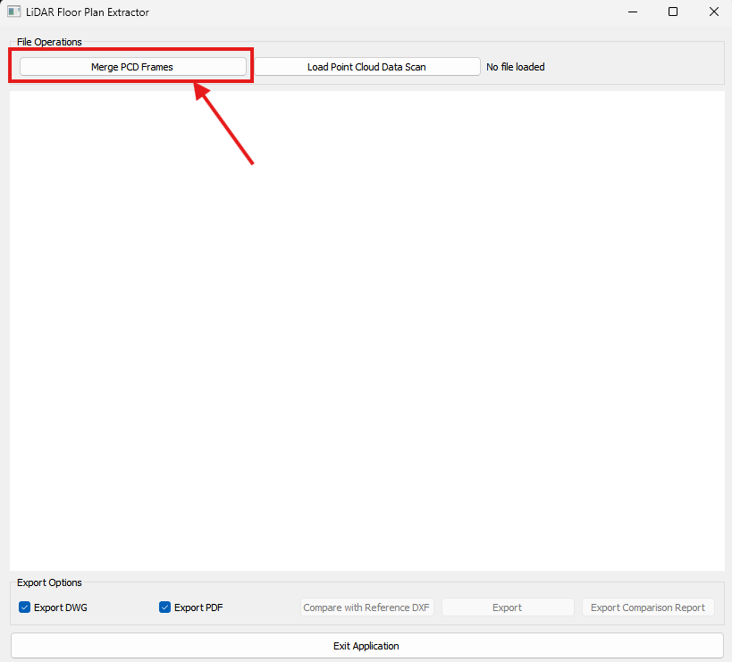
Using this feature is straightforward. Users can click the “Merge PCD Frames” button in the GUI and select multiple .pcd files. The system then reduces the data size and uses the Iterative Closest Point (ICP) algorithm with Open3D to align the scans.
This integration is particularly useful in scenarios where a static LiDAR unit captures multiple frames from the same room. Rather than capturing the environment from various angles, the system improves scan density and reduces noise by aggregating redundant data acquired over a short timeframe. This results in a cleaner, more reliable point cloud without the overhead of complex registration across multiple scan positions.
From a user perspective, the process is intuitive. By selecting the “Merge PCD Frames” button in the GUI, users can choose multiple .pcd files. The system then performs voxel downsampling and applies the Iterative Closest Point (ICP) algorithm using Open3D to align the scans.
This capability is particularly helpful when capturing scans over time from the same viewpoint, especially in environments where the scanner is static but collects multiple frames due to temporal changes, sensor drift, or multiple scan cycles for improved accuracy. After merging, the unified point cloud is visualised and stored for later use in floor plan extraction, wall segmentation, and validation.
It also removes the need for external tools like CloudCompare during the early processing stages, maintaining a consistent, self-contained workflow.