Blog 10: From Walls to Geometry – Extending Extraction through the GUI
Once a unified point cloud has been created through scan merging, the next stage in the pipeline is structural analysis. This blog focuses on how wall detection and geometry extraction are embedded directly into the GUI, enabling users to convert dense LiDAR scans into simplified 2D outlines of indoor spaces.
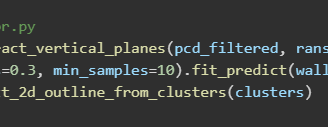
When a user selects a merged .pcd file using the “Load Scan” button, the system applies two essential preprocessing techniques: statistical outlier removal and voxel downsampling. These steps reduce noise and optimise the point cloud for segmentation, which is handled using the RANSAC algorithm. RANSAC searches for dominant vertical planes by iteratively fitting candidate surfaces and rejecting outliers as necessary.
Once planar surfaces are detected, the DBSCAN clustering algorithm is used to spatially group them. This prevents scattered wall fragments from being misclassified, thereby improving the reliability of the layout reconstruction.
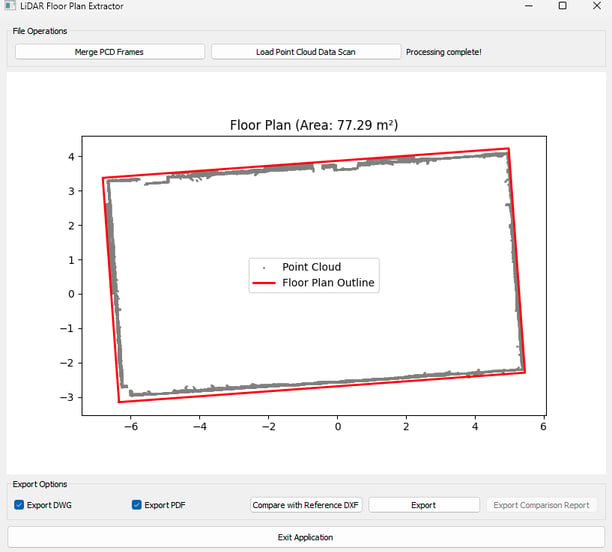
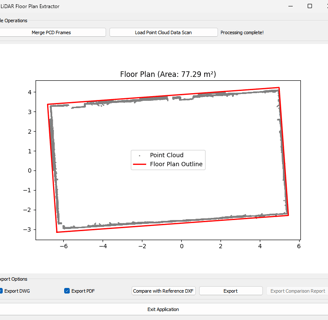
The wall segments are then projected onto a 2D plane, forming a polygonal representation of the space. The GUI visualises this in real time using Matplotlib. Detected walls are shown with red bounding rectangles, and the overall room outline is displayed in blue. These outputs enable the user to verify whether the scan has been interpreted correctly before proceeding to the export or comparison stages.
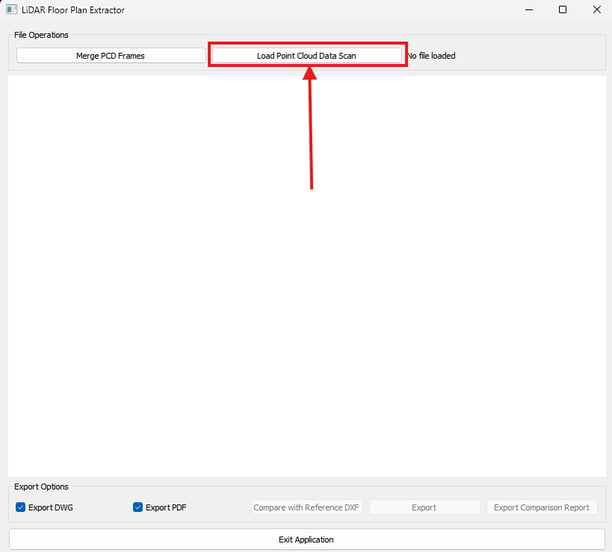
User Workflow Example:
Click “Load PCD Scan” and select a .pcd file.
The system processes the point cloud and displays segmentation logs in the GUI.
Once wall segments are detected, the floor plan preview is updated.
Users can inspect and re-run segmentation with adjusted parameters if necessary.
This approach benefits users working in environments such as historical building renovations or undocumented layouts, where no existing plans are available.